Dinámica de Sistemas MulticuerpoMultibody Systems Dynamics
Modelado y simulación dinámica de un sistema multicuerpo articulado en MSC Adams y Matlab. Análisis de fuerzas de reacción en juntas, perfiles de aceleración y balances energéticos a lo largo del ciclo completo de movimiento.
Modelling and dynamic simulation of an articulated multibody system in MSC Adams and Matlab. Analysis of joint reaction forces, acceleration profiles and energy balances over the full motion cycle.
CE
Cristian EstévezIngeniero mecánico · MSC Adams · Diciembre 2016Mechanical engineer · MSC Adams · December 2016
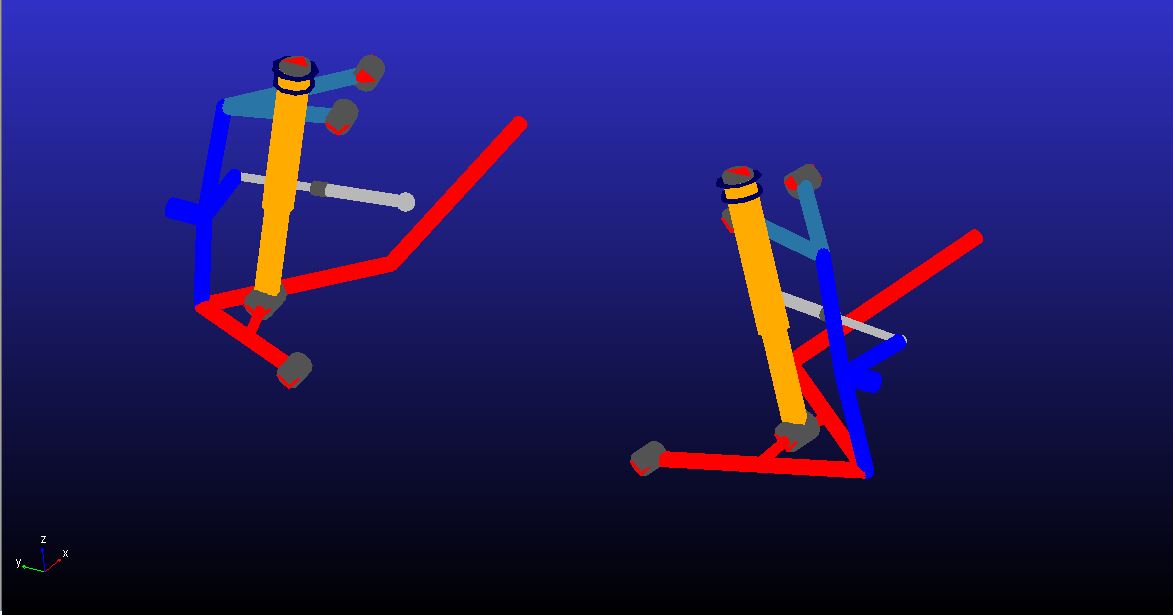
Modelo multicuerpo del mecanismo articulado en MSC Adams. Vista del grafo de cuerpos con juntas y fuerzas aplicadas.
La dinámica de sistemas multicuerpo permite analizar el comportamiento cinemático y dinámico de mecanismos articulados sin necesidad de resolver las ecuaciones de movimiento a mano. Este proyecto aplicó la metodología a un mecanismo de cuatro barras con un grado de libertad.
Formulación del problema
El sistema se formuló mediante coordenadas generalizadas y restricciones holonómicas. La integración numérica se realizó con el solver de índice reducido de MSC Adams, que transforma las ecuaciones algebraico-diferenciales en un sistema de EDOs de primer orden.
Los resultados del integrador se exportaron a Matlab para el post-procesado: representación gráfica de las fuerzas en juntas, perfiles de velocidad y aceleración de los cuerpos, y cálculo del balance energético (cinética, potencial y disipación por amortiguamiento).
El pico de fuerza en la junta principal no aparece en el punto de máxima velocidad, sino 15° antes — cuando la aceleración angular es máxima. Este decalaje es imposible de ver sin la simulación dinámica.
Validación
Los resultados se verificaron con un modelo analítico simplificado del mismo mecanismo resuelto en Matlab. La concordancia entre ambos modelos fue inferior al 2% en las variables de estado principales, confirmando la validez de la formulación numérica.
Fin del proyecto
Multibody model of the articulated mechanism in MSC Adams. Body graph view with joints and applied forces.
Multibody dynamics allows the kinematic and dynamic behaviour of articulated mechanisms to be analysed without solving the equations of motion by hand. This project applied the methodology to a four-bar mechanism with one degree of freedom.
Problem formulation
The system was formulated using generalised coordinates and holonomic constraints. Numerical integration was carried out with MSC Adams's index-reduction solver, which transforms the differential-algebraic equations into a first-order ODE system.
Integrator results were exported to Matlab for post-processing: graphical representation of joint forces, velocity and acceleration profiles for each body, and energy balance computation (kinetic, potential and damping dissipation).
The peak force at the main joint does not occur at maximum velocity, but 15° earlier — when angular acceleration is highest. This offset is impossible to see without the dynamic simulation.
Validation
Results were verified against a simplified analytical model of the same mechanism solved in Matlab. Agreement between both models was below 2% for the main state variables, confirming the validity of the numerical formulation.